Underwater Tactile Sensing
Bringing a Sense of Touch to Underwater Robotics
From our paper:
Tactile Sensing Based on Fingertip Suction Flow for Underwater Manipulation
By Philippe Nadeau, Michael Abbott, Dominic Melville and Hannah S. Stuart
In IEEE International Conference on Robotics and Automation (ICRA) 2020
🔗 Paper link
Bringing a Sense of Touch to Underwater Robotics
The ocean is one of the most challenging environments for robotic manipulation. In deep or murky waters, vision is often unreliable, and traditional tactile sensors struggle due to high ambient pressures and saltwater corrosion. In this project, we introduce a novel tactile sensing modality, enabling underwater robots to sense object interactions without embedding fragile electronics in the robot gripper. This technique allows remote sensing of contact conditions, making it robust for deep-sea and harsh aquatic environments. By leveraging suction flow dynamics through learning-based interaction force prediction, our system enables robots to “feel” objects underwater without requiring embedded electronics or fragile pressure-sensitive materials.
The Suction Flow Tactile Sensing System
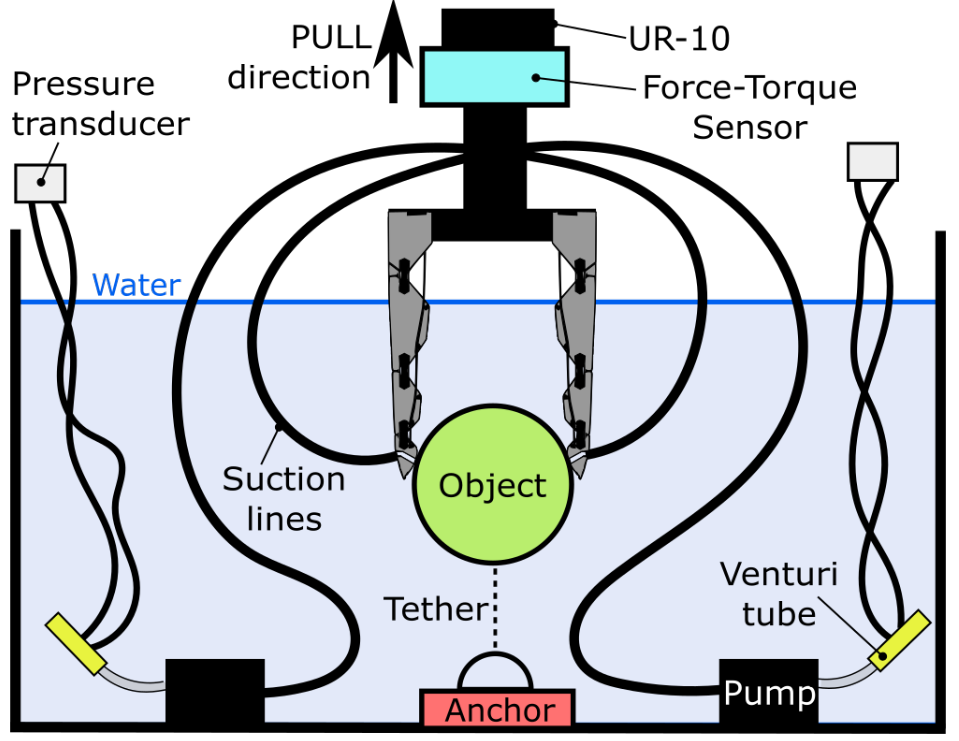
In this study, suction is applied to the fingertips of a two-fingered compliant gripper, and interaction force is monitored while our gripper pulls on an object anchored in a water tank. The system consists of:
- UR 10 robot arm with Robotiq FT-300 force-torque sensor: Powered by ROS, the robot arm is used to manipulate objects in the water tank.
- Tendon-driven soft fingers: Two opposed compliant gripper fingers with embedded suction channels are used to grasp the object.
- Fingertip suction orifices: Water is drawn through small channels in the fingertips via an external pump system.
- Differential flow transducer: Measure the suction flow rate, which changes as objects occlude the orifice.
- Custom-built data acquisition system: Collects real-time suction flow signals during grasping interactions and records ground-truth force measurements.
When an object enters the suction field, it alters the flow rate in ways that correlate with contact conditions at the fingertips.
Learning Tactile Perception from Suction Flow
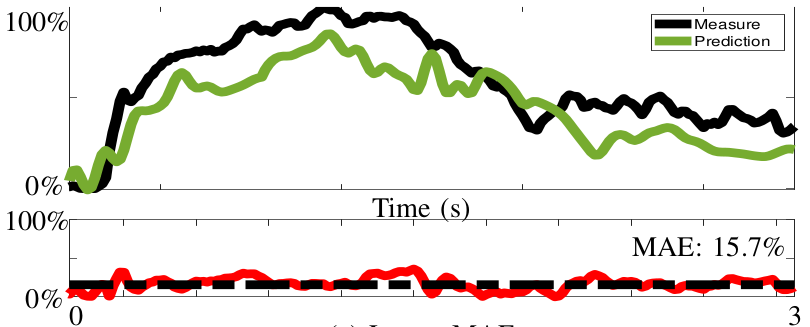
As a proof of concept, a recurrent neural network model was trained to predict external force trends using only the suction signals. The model was trained on real-world interaction data, using ground-truth force measurements and object motion collected with our automated setup.
- Suction engagement signals for the last five timesteps are used as input to the model.
- Two LSTM layers process the input sequence, capturing temporal dependencies in the suction flow signals.
- A fully connected layer outputs the predicted suction engagement for the next timestep.
- Force predictions can be used to detect impending grasp failures when a significant drop in suction engagement is detected.
Our model exhibit robustness to variations in object size and pulling behavior, and demonstrates that suction flow is a promising modality for forceful underwater manipulation tasks.