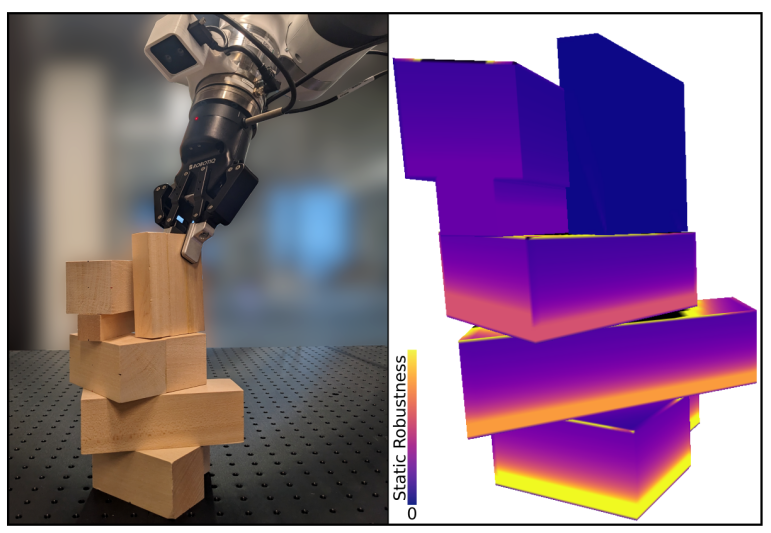
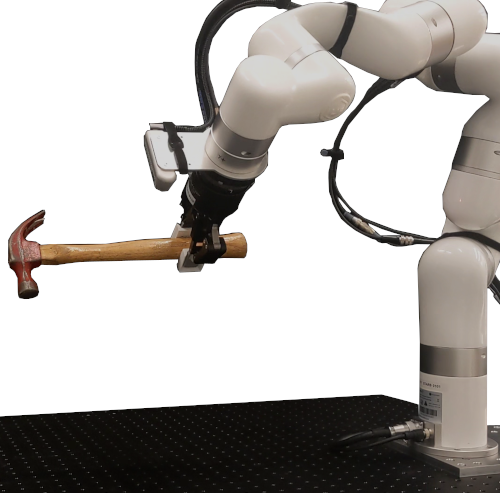
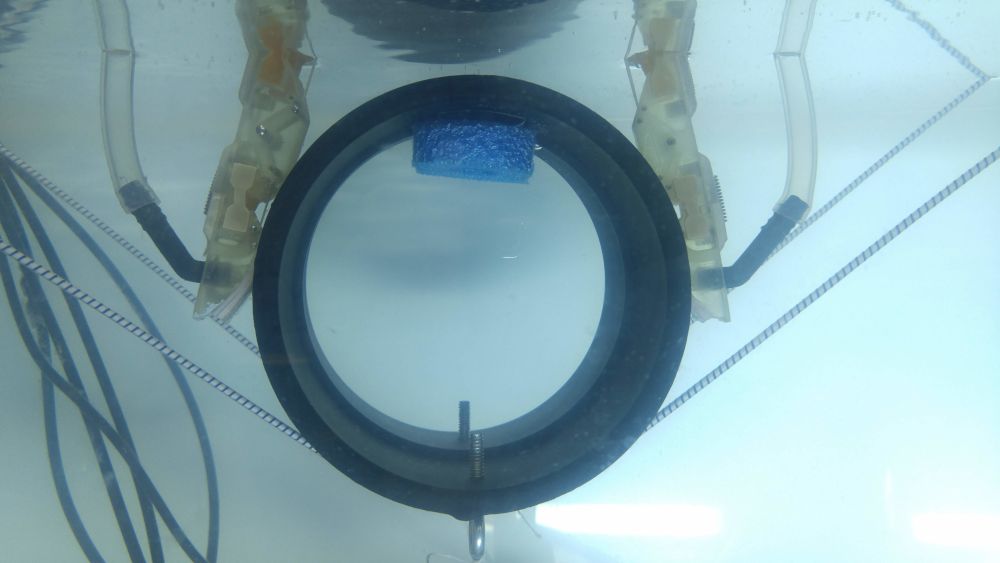
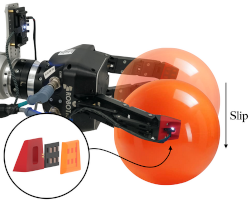
software ATI Axia F/T Sensor Python Driver Easy Integration of ATI Axia Force-Torque Sensors into Python Projects Robot Arm Kinematic Calibration Simple Python Library for Kinematic Calibration of Robot Arms Robotiq 2F-85 Gripper Driver Simplifying the Integration of the Robotiq 2F-85 Gripper into Python-based workflows With-Respect-To Fast and simple 3D pose manager to stop worrying about rigid transformations research Efficiently Planning Stable Object Placements A fast, general, and physically-grounded method to stable placement planning 3D Part Segmentation for Inertial Identification Understanding Objects Through Shape and Structure Inertial Identification with Cobots Enabling Cobots to Rapidly Understand the Objects They Manipulate Underwater Tactile Sensing Bringing a Sense of Touch to Underwater Robotics A Standard Notation for Robotics RIGID – A concise yet unambiguous rigid transformation notation convention collaborations Slip Detection from our paper titled "Learning to Detect Slip with Barometric Tactile Sensors and a Temporal Convolutional Neural Network" Tactile-Based Object Recognition from our paper titled "Tactile-Based Object Recognition Using a Grasp-Centric Exploration"